Trushant Adeshara
Trushant Adeshara
Robotics @ University of Michigan
Robotics @ University of Michigan
Ann Arbor, MI, US
Building Physical AI
trushantadeshara99@gmail.com
trushantadeshara99@gmail.com
About me
About me
Hi there 👋
I'm Trushant Adeshara, a passionate Robotics Researcher and current M.S. student in Robotics at the University of Michigan.
My ongoing research focuses on multi-robot systems, parallel computing, hardware acceleration, system and software architecture. In Professor Dimitra Panagou's Distributed Aerospace Systems and Control (DASC) Lab, I am developing simulation stack for heterogeneous multi-robot exploration with Isaac Sim, integrating Isaac ROS Nvblox for voxel-based mapping and path planning. Recently, I aided in incorporating certifiable guarantees into visual odometry and mapping to ensure safe and reliable trajectory generation in dynamic environments, bridging simulations with real-world applications.
At Wastefull Insights, I spent 1.5 years building the brains behind gantry-based pick-and-place waste segregation robots. I integrated YOLOv7 and DeepStream into a ROS-powered system for real-time perception, and redesigned the scheduling algorithms to double system throughput. I also built a CI/CD pipeline that cut deployment times by 70%, making updates faster and field-ready.
During my undergraduate studies in Computer Science and Engineering, I interned at Botsync, where I conducted accuracy tests on mobile robots for docking and migrated code from Python to C++. I also worked on multi-robot behavioral graph in Open-RMF, enabling collision-free task execution for mobile robots.
Feel free to explore my work and reach out if you'd like to collaborate or learn more about my experiences!
Education 🎓
Education 🎓
Ann Arbor, MI, USA
Aug 2023 - May 2025
M.S. in Robotics
University of Michigan
GPA 3.9/4
Relevant Courses: Multi-Robot Systems, Algorithmic Robotics, Deep Learning for Robot Perception, Robotics Control, Robotics System Lab, and 3D Robot Perception.
Ann Arbor, MI, USA
Aug 2023 - May 2025
M.S. in Robotics
University of Michigan
GPA 3.9/4
Relevant Courses: Multi-Robot Systems, Algorithmic Robotics, Deep Learning for Robot Perception, Robotics Control, Robotics System Lab, and 3D Robot Perception.
Vadodara, GJ, India
Jun 2018 - Jun 2022
B. E. in Computer Science and Engineering
Gujarat Technological University
CGPA 9.8/10
Relevant Courses: Computer Networks, Artificial Intelligence, Distributed Systems, Machine Learning, System Software, Data Mining, and Theory of Computation.
Vadodara, GJ, India
Jun 2018 - Jun 2022
B. E. in Computer Science and Engineering
Gujarat Technological University
CGPA 9.8/10
Relevant Courses: Computer Networks, Artificial Intelligence, Distributed Systems, Machine Learning, System Software, Data Mining, and Theory of Computation.
Work Experience 🏢
Work Experience 🏢
Detroit, MI, USA
Peer Robotics
Jan 2025 – Present
Robotics Software Intern
Built an Isaac Sim pipeline to test the scalability of Peer’s autonomy stack in custom warehouse environments.
Integrated ros2_control hardware interface with Isaac Sim to support custom controller development and simulation.
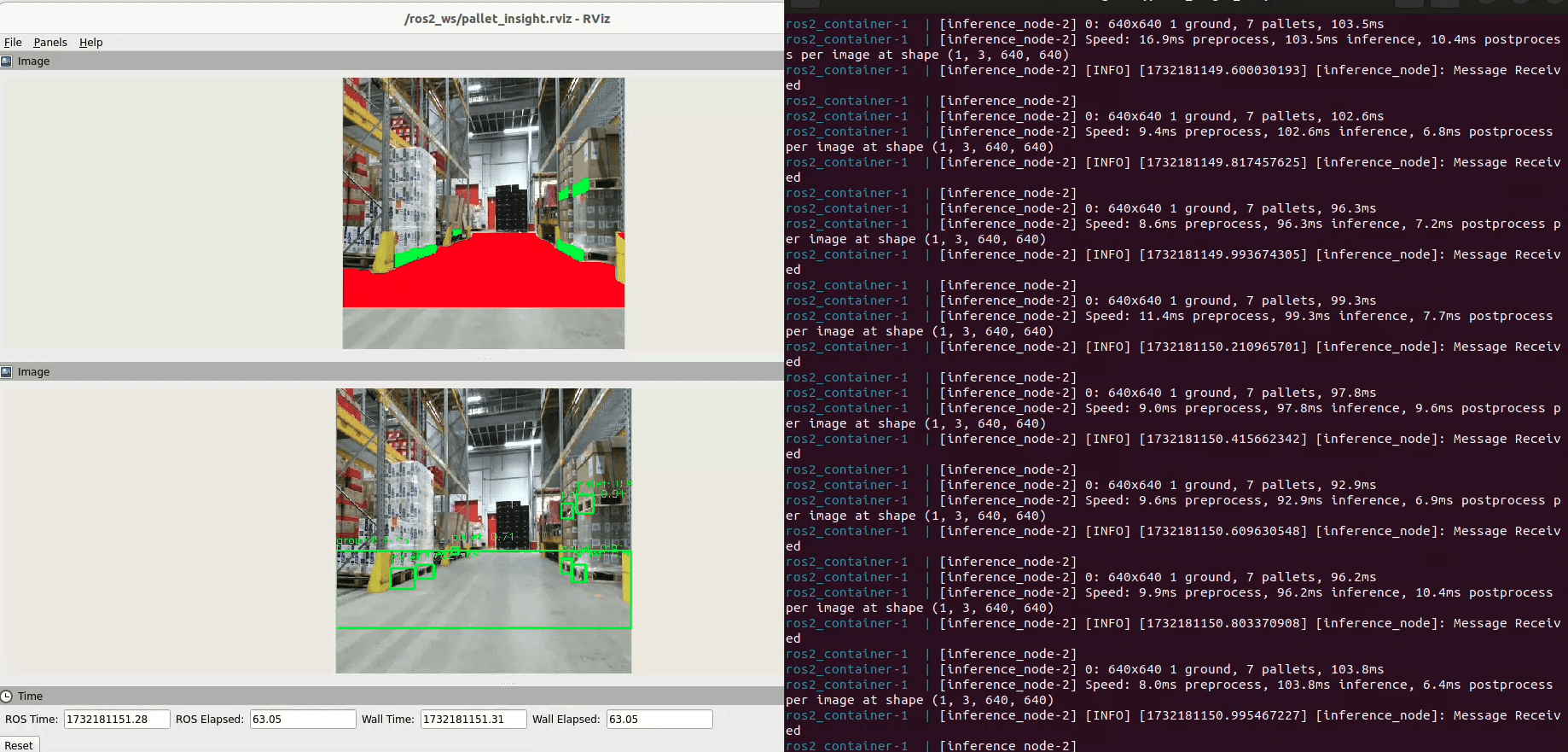
Developed a ROS 2 package for pallet detection and segmentation, achieving 40% better resource utilization through TensorRT optimization.
Automated dataset labeling using Grounded DINO for detection and Segment Anything for segmentation, accelerating model training workflows.
Detroit, MI, USA
Peer Robotics
Jan 2025 – Present
Robotics Software Intern
Built an Isaac Sim pipeline to test the scalability of Peer’s autonomy stack in custom warehouse environments.
Integrated ros2_control hardware interface with Isaac Sim to support custom controller development and simulation.
Developed a ROS 2 package for pallet detection and segmentation, achieving 40% better resource utilization through TensorRT optimization.
Automated dataset labeling using Grounded DINO for detection and Segment Anything for segmentation, accelerating model training workflows.
Vadodara, GJ, India
Wastefull Insights
Jan 2022 - Jun 2023
Robotics Engineer
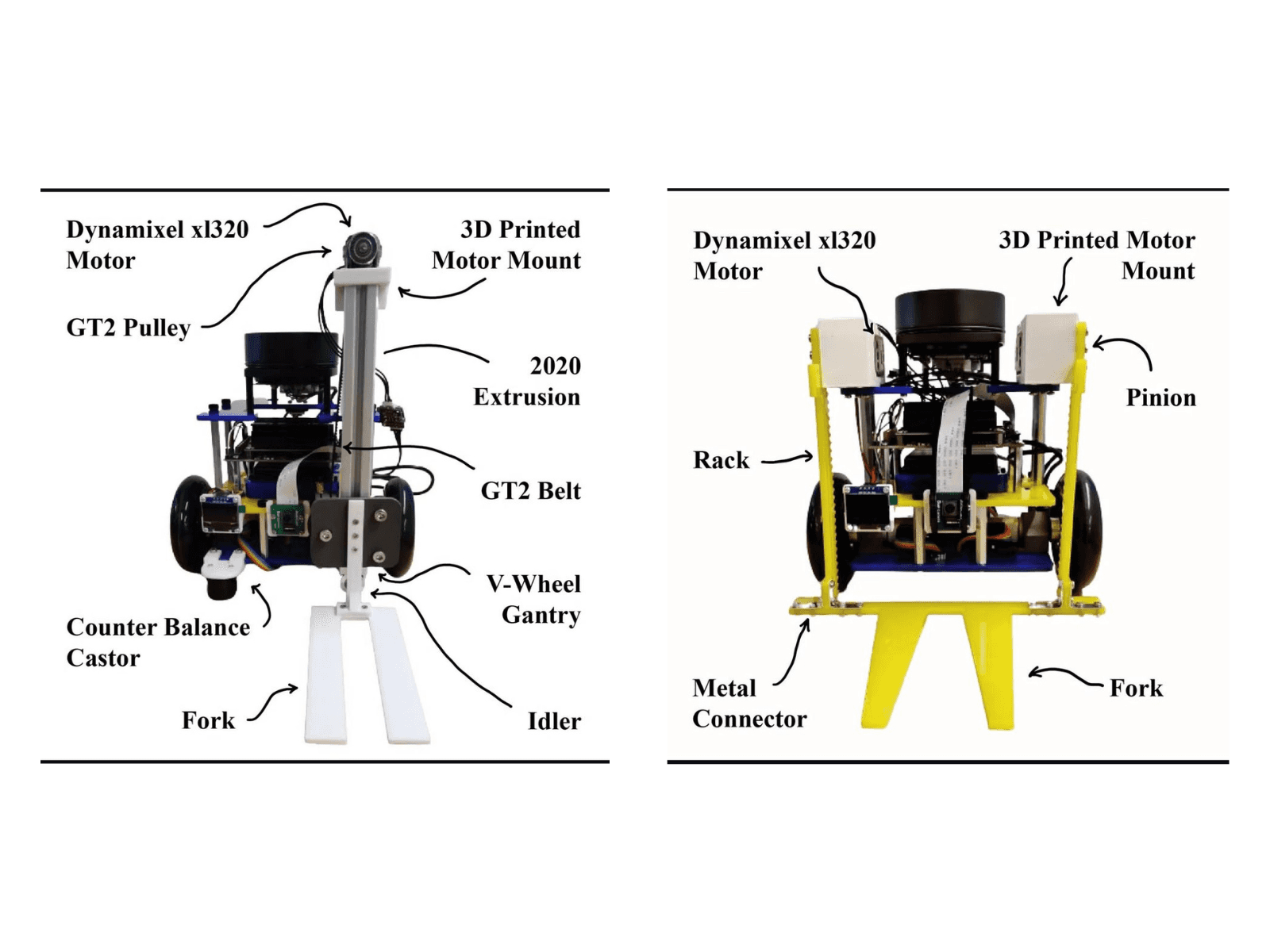
Built a containerized CI/CD pipeline enabling software updates for deployed robots in under 20 minutes across multiple sites.
Designed and maintained a preemptive scheduling algorithm with Kalman filter-based state estimation, doubling throughput of a pick-and-place waste segregation robot.
Reduced vision pipeline latency by replacing OpenCV’s frame-by-frame processing with a DeepStream-based streaming application.
Contributed to hiring and mentored interns during the company’s transition from Python to C++, guiding codebase migration efforts.
Vadodara, GJ, India
Wastefull Insights
Jan 2022 - Jun 2023
Robotics Engineer
Built a containerized CI/CD pipeline enabling software updates for deployed robots in under 20 minutes across multiple sites.
Designed and maintained a preemptive scheduling algorithm with Kalman filter-based state estimation, doubling throughput of a pick-and-place waste segregation robot.
Reduced vision pipeline latency by replacing OpenCV’s frame-by-frame processing with a DeepStream-based streaming application.
Contributed to hiring and mentored interns during the company’s transition from Python to C++, guiding codebase migration efforts.
Bengaluru, KA, India
Botsync
Jun 2021 - Aug 2021
Robotics Software intern
Optimized multi-robot behavior graphs for collision-free navigation using Open-RMF in ROS 2.
Migrated dock charging station code from Python to C++14 for 1000 kg-payload industrial mobile robots, improving reliability and performance.
Bengaluru, KA, India
Botsync
Jun 2021 - Aug 2021
Robotics Software intern
Optimized multi-robot behavior graphs for collision-free navigation using Open-RMF in ROS 2.
Migrated dock charging station code from Python to C++14 for 1000 kg-payload industrial mobile robots, improving reliability and performance.
Research 🔬
Research 🔬
Ann Arbor, MI, USA
DASC Lab - UofM Robotics
Jul 2024 - Present
Research Assistant
Built a heterogeneous multi-robot exploration system in Isaac Sim using a UGV and a quadrotor. Enabled coordinated autonomy for testing exploration strategies in simulation.
Integrated the Nvblox module from the Isaac ROS library for voxel-based mapping and planning. Conducted hardware-in-the-loop tests to validate performance in real-world scenarios.
Ann Arbor, MI, USA
DASC Lab - UofM Robotics
Jul 2024 - Present
Research Assistant
Built a heterogeneous multi-robot exploration system in Isaac Sim using a UGV and a quadrotor. Enabled coordinated autonomy for testing exploration strategies in simulation.
Integrated the Nvblox module from the Isaac ROS library for voxel-based mapping and planning. Conducted hardware-in-the-loop tests to validate performance in real-world scenarios.
Ann Arbor, MI, USA
BRG Lab - UofM Robotics
Jan 2025 – Present
Independent Research
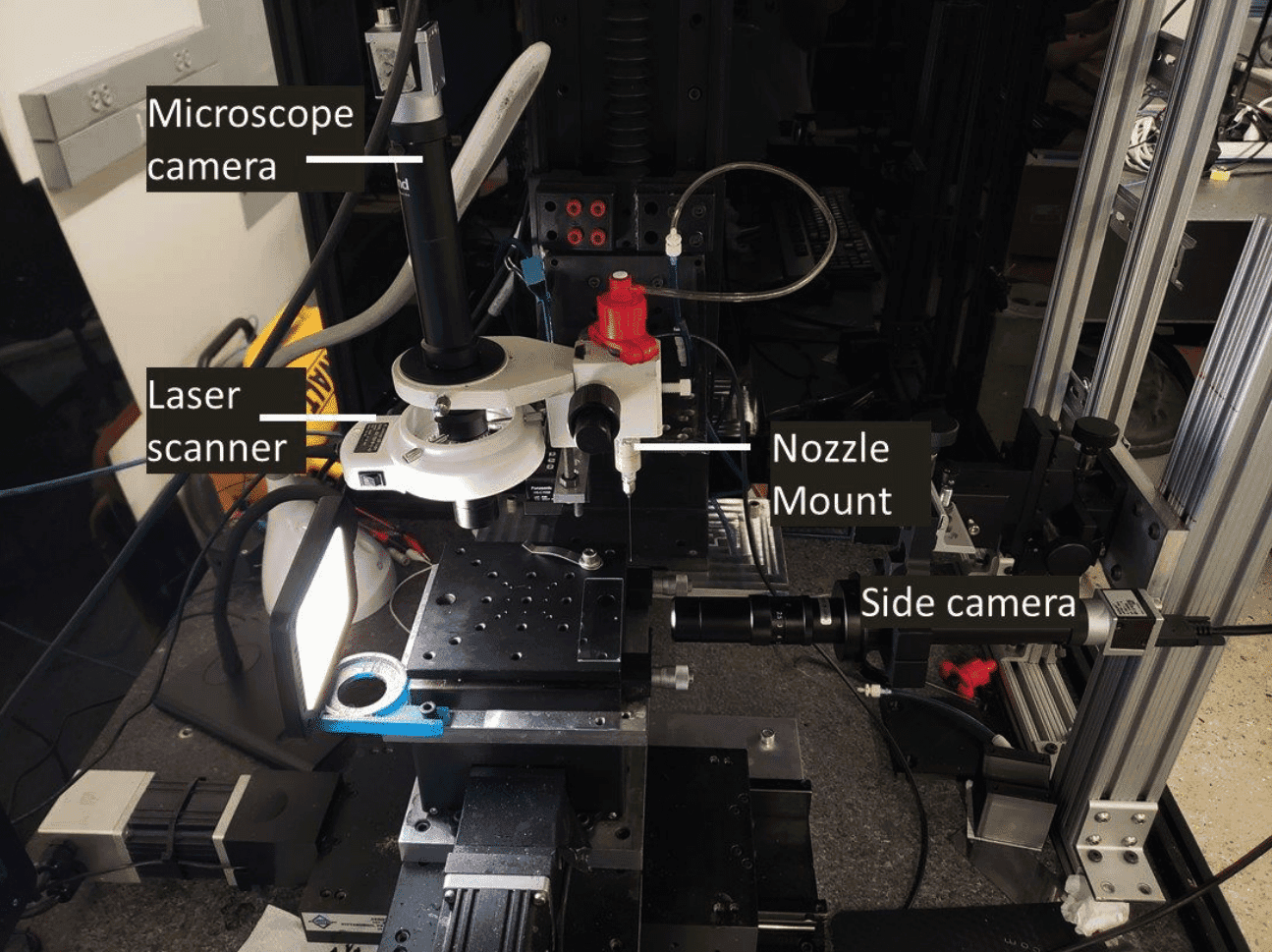
Developed vision and control software for a micrometer-precision conductive ink printing system. Focused on system integration, precision motion, and real-time performance.
Designed algorithms for line width estimation enabling closed-loop visual feedback. Improved print accuracy through dynamic correction during deposition.
Ann Arbor, MI, USA
BRG Lab - UofM Robotics
Jan 2025 – Present
Independent Research
Developed vision and control software for a micrometer-precision conductive ink printing system. Focused on system integration, precision motion, and real-time performance.
Designed algorithms for line width estimation enabling closed-loop visual feedback. Improved print accuracy through dynamic correction during deposition.

Tech Stack 🛠️
Tech Stack 🛠️
Awards & Achievements 🏆
Awards & Achievements 🏆
Michigander Scholar [2024 - 2025]
A statewide effort to connect top engineering and CS talent with Michigan’s EV and mobility industry.
At Peer Robotics, I helped build intelligent, collaborative robots that empower human workers—directly contributing to Michigan’s mobility future. The Michigander Scholars Program amplified this experience, supporting my mission to innovate in-state and drive forward the program’s vision of retaining top talent to lead the next era of mobility.
Michigander Scholar [2024 - 2025]
A statewide effort to connect top engineering and CS talent with Michigan’s EV and mobility industry.
At Peer Robotics, I helped build intelligent, collaborative robots that empower human workers—directly contributing to Michigan’s mobility future. The Michigander Scholars Program amplified this experience, supporting my mission to innovate in-state and drive forward the program’s vision of retaining top talent to lead the next era of mobility.
Top Contributor at Gazebo Ionic Testing & Tutorial Party [2024]
Open-Source Contribution
Resolved 54 issues during the official testing sprint, helping improve the performance, documentation, and usability of the Gazebo Ionic release. Contributed feedback, bug reports, and tutorial improvements
Top Contributor at Gazebo Ionic Testing & Tutorial Party [2024]
Open-Source Contribution
Resolved 54 issues during the official testing sprint, helping improve the performance, documentation, and usability of the Gazebo Ionic release. Contributed feedback, bug reports, and tutorial improvements
Top Contributor at ROS 2 Jazzy Jalisco Testing & Tutorial Party [2024]
Open-Source Contribution
Resolved 67 issues during the official testing sprint, helping improve the performance, documentation, and usability of the Gazebo Ionic release. Contributed feedback, bug reports, and tutorial improvements
Top Contributor at ROS 2 Jazzy Jalisco Testing & Tutorial Party [2024]
Open-Source Contribution
Resolved 67 issues during the official testing sprint, helping improve the performance, documentation, and usability of the Gazebo Ionic release. Contributed feedback, bug reports, and tutorial improvements
TEDxDetroit [2024]
Speaker Support and Robotics Department Representative
TEDxDetroit is an annual gathering of the area’s leading thinkers, designers, entrepreneurs, educators, scientists, and artists in downtown Detroit. This was the 16th year of the popular day-long conference, which shined a light on remarkable technologies, companies, and people that make Detroit an amazing place to live, work, and play.
TEDxDetroit [2024]
Speaker Support and Robotics Department Representative
TEDxDetroit is an annual gathering of the area’s leading thinkers, designers, entrepreneurs, educators, scientists, and artists in downtown Detroit. This was the 16th year of the popular day-long conference, which shined a light on remarkable technologies, companies, and people that make Detroit an amazing place to live, work, and play.
MassRobotics Form and Function Challenge [2024]
Speaker Support and Robotics Department Representative
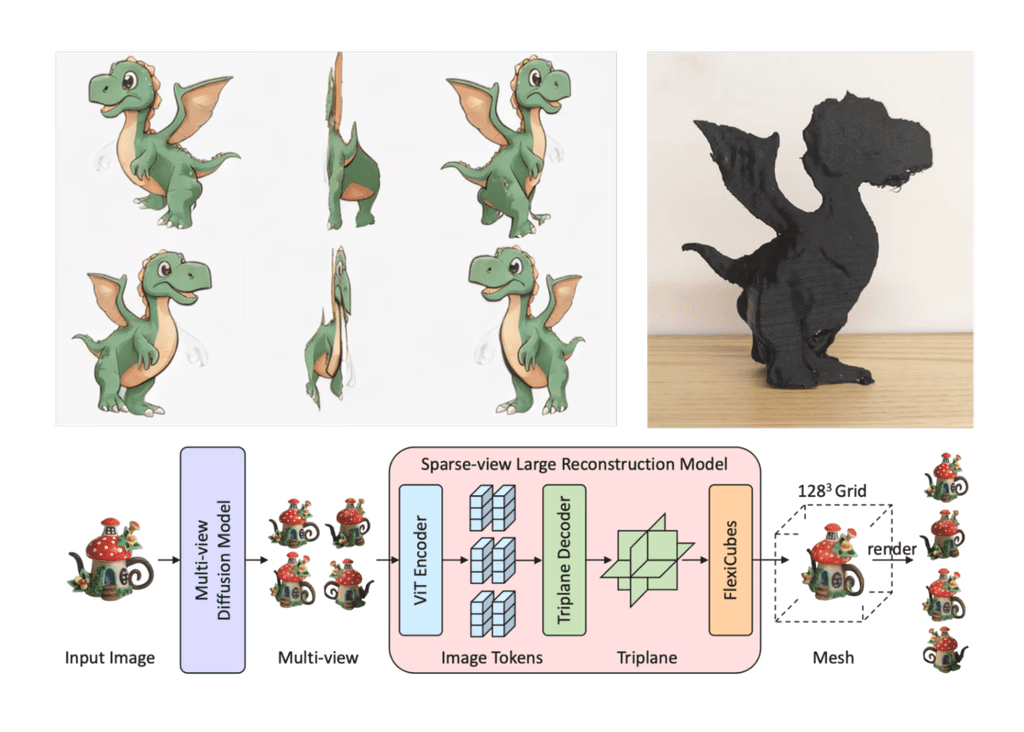
Developed Speech2Mesh, an AI-powered system that converts voice prompts into 3D-printable meshes. Showcased the project at the Robotics Summit & Expo, demonstrating real-time generative design for additive manufacturing and human-robot collaboration.
MassRobotics Form and Function Challenge [2024]
Speaker Support and Robotics Department Representative
Developed Speech2Mesh, an AI-powered system that converts voice prompts into 3D-printable meshes. Showcased the project at the Robotics Summit & Expo, demonstrating real-time generative design for additive manufacturing and human-robot collaboration.