Dec 24, 2024
A Framework for Modeling and Control for Extrusion-based Additive Manufacturing
A Framework for Modeling and Control for Extrusion-based Additive Manufacturing
A closed-loop control framework for extrusion-based 3D printing using vision-based feedback.
A closed-loop control framework for extrusion-based 3D printing using vision-based feedback.
Vision-Driven Precision in 3D Printing
Additive manufacturing (AM), particularly extrusion-based 3D printing, has seen rapid growth thanks to its ability to produce customized, complex parts. However, as industries push for higher precision and consistency, the traditional open-loop printing methods begin to fall short. This research introduces a vision-based closed-loop control framework that brings intelligence and adaptability to the printing process, addressing common challenges like nozzle clogging and over-extrusion without human intervention.
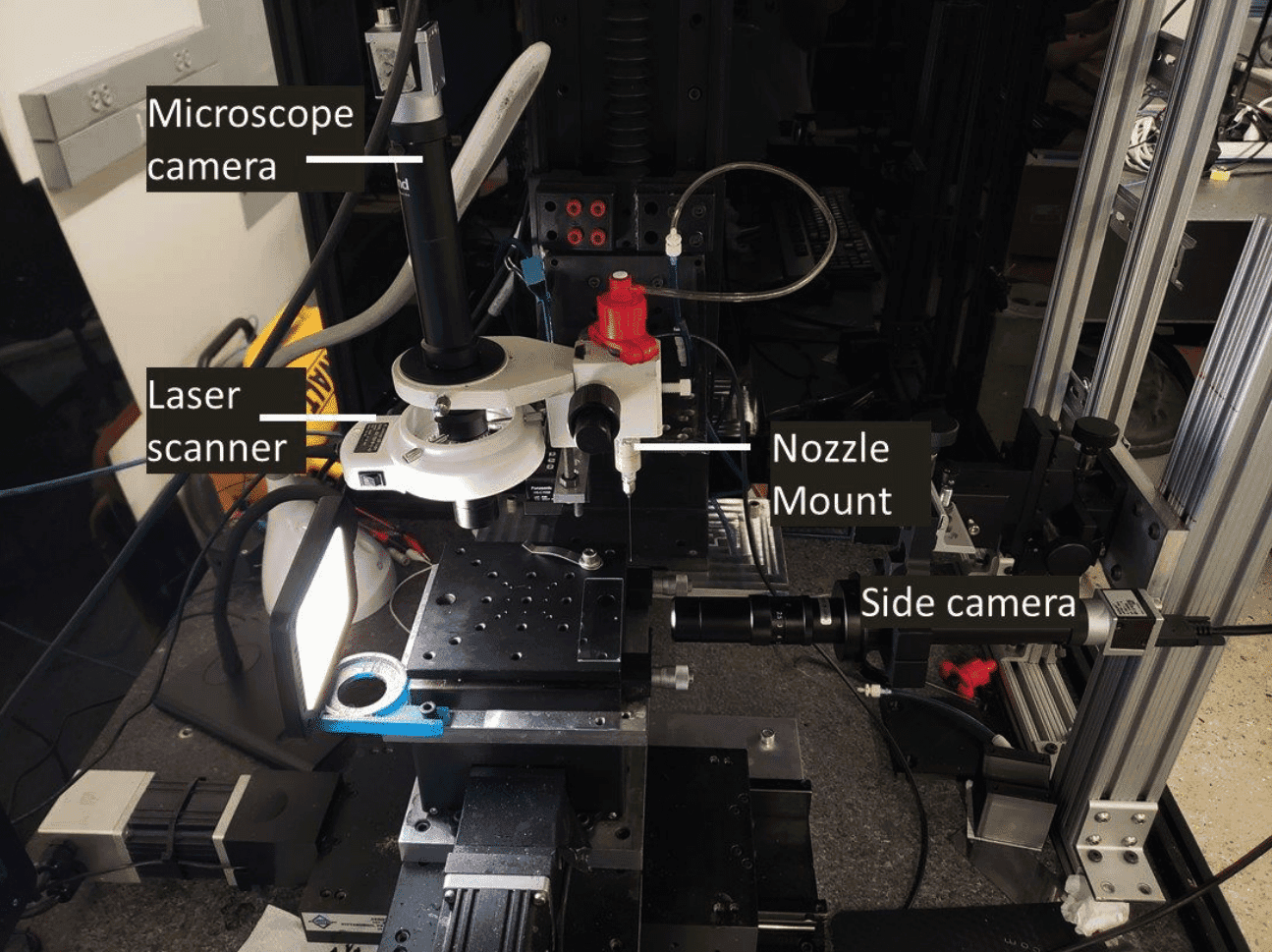
At the heart of the system is a pair of high-resolution cameras integrated into the printing setup—one focused on real-time nozzle monitoring and another dedicated to measuring line width with microscope-level accuracy. A custom image processing pipeline extracts key metrics from the printed lines, including width and shape. If any deviation is detected, the system updates the print parameters—like stage speed—automatically, using a learning-based control law to converge toward the desired output.
The innovation goes beyond simple feedback correction. The framework includes a detailed process and performance modeling strategy, linking print inputs like pressure and speed to physical output characteristics such as line width and electrical resistance. This allows for predictive control, where desired outcomes (e.g., a target resistance for a conductive path) can dictate printing conditions proactively, not just reactively.
One of the most impressive aspects of this work is its transferability. The control strategy was tested on a second printer with different mechanical and sensing configurations. With minimal tuning—mainly adjusting image capture settings and re-fitting the process model using existing physics—it achieved similar performance. This makes the framework highly scalable and adaptable across different systems and use cases.
By integrating vision, physics-based modeling, and iterative learning control, this approach sets a new standard for smart manufacturing. It paves the way for robust, repeatable, and high-quality 3D printing workflows that adapt in real time to process variations. Whether it’s for wearable electronics, biomedical devices, or soft robotics, such vision-driven feedback systems will play a key role in making next-gen additive manufacturing more reliable and production-ready.
Vision-Driven Precision in 3D Printing
Additive manufacturing (AM), particularly extrusion-based 3D printing, has seen rapid growth thanks to its ability to produce customized, complex parts. However, as industries push for higher precision and consistency, the traditional open-loop printing methods begin to fall short. This research introduces a vision-based closed-loop control framework that brings intelligence and adaptability to the printing process, addressing common challenges like nozzle clogging and over-extrusion without human intervention.
At the heart of the system is a pair of high-resolution cameras integrated into the printing setup—one focused on real-time nozzle monitoring and another dedicated to measuring line width with microscope-level accuracy. A custom image processing pipeline extracts key metrics from the printed lines, including width and shape. If any deviation is detected, the system updates the print parameters—like stage speed—automatically, using a learning-based control law to converge toward the desired output.
The innovation goes beyond simple feedback correction. The framework includes a detailed process and performance modeling strategy, linking print inputs like pressure and speed to physical output characteristics such as line width and electrical resistance. This allows for predictive control, where desired outcomes (e.g., a target resistance for a conductive path) can dictate printing conditions proactively, not just reactively.
One of the most impressive aspects of this work is its transferability. The control strategy was tested on a second printer with different mechanical and sensing configurations. With minimal tuning—mainly adjusting image capture settings and re-fitting the process model using existing physics—it achieved similar performance. This makes the framework highly scalable and adaptable across different systems and use cases.
By integrating vision, physics-based modeling, and iterative learning control, this approach sets a new standard for smart manufacturing. It paves the way for robust, repeatable, and high-quality 3D printing workflows that adapt in real time to process variations. Whether it’s for wearable electronics, biomedical devices, or soft robotics, such vision-driven feedback systems will play a key role in making next-gen additive manufacturing more reliable and production-ready.
Vision-Driven Precision in 3D Printing
Additive manufacturing (AM), particularly extrusion-based 3D printing, has seen rapid growth thanks to its ability to produce customized, complex parts. However, as industries push for higher precision and consistency, the traditional open-loop printing methods begin to fall short. This research introduces a vision-based closed-loop control framework that brings intelligence and adaptability to the printing process, addressing common challenges like nozzle clogging and over-extrusion without human intervention.
At the heart of the system is a pair of high-resolution cameras integrated into the printing setup—one focused on real-time nozzle monitoring and another dedicated to measuring line width with microscope-level accuracy. A custom image processing pipeline extracts key metrics from the printed lines, including width and shape. If any deviation is detected, the system updates the print parameters—like stage speed—automatically, using a learning-based control law to converge toward the desired output.
The innovation goes beyond simple feedback correction. The framework includes a detailed process and performance modeling strategy, linking print inputs like pressure and speed to physical output characteristics such as line width and electrical resistance. This allows for predictive control, where desired outcomes (e.g., a target resistance for a conductive path) can dictate printing conditions proactively, not just reactively.
One of the most impressive aspects of this work is its transferability. The control strategy was tested on a second printer with different mechanical and sensing configurations. With minimal tuning—mainly adjusting image capture settings and re-fitting the process model using existing physics—it achieved similar performance. This makes the framework highly scalable and adaptable across different systems and use cases.
By integrating vision, physics-based modeling, and iterative learning control, this approach sets a new standard for smart manufacturing. It paves the way for robust, repeatable, and high-quality 3D printing workflows that adapt in real time to process variations. Whether it’s for wearable electronics, biomedical devices, or soft robotics, such vision-driven feedback systems will play a key role in making next-gen additive manufacturing more reliable and production-ready.